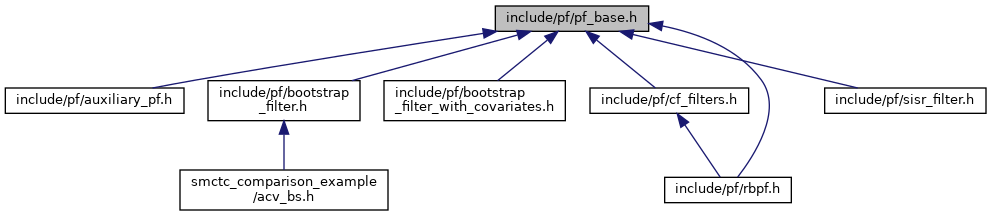
All non Rao-Blackwellized particle filters without covariates inherit from this. More...
#include <map>#include <string>#include <vector>#include <Eigen/Dense>
Go to the source code of this file.
Detailed Description
All non Rao-Blackwellized particle filters without covariates inherit from this.
inherit from this if, in addition to filtering, you want to simulate future trajectories from the current filtering distribution. This simulates two future trajectories for each particle you have–one for the state path, and one for the observation path. Unlike the above class, this one
inherit from this if, in addition to filtering, you want to simulate future trajectories from the current filtering distribution. This simulates two future trajectories for each particle you have–one for the state path, and one for the observation path.
inherit from this if you want to simulate from a homogeneous forward/generative model. This class is more general than the above because it can simulate future states using past observations.
inherit from this if you want to simulate from a homogeneous forward/generative model.
All Rao-Blackwellized particle filters inherit from this.
All non Rao-Blackwellized particle filters with covariates inherit from this.
- Template Parameters
-
float_t (e.g. double, float, etc.) dimobs the dimension of each observation dimstate the dimension of each state
- Template Parameters
-
float_t (e.g. double, float, etc.) dimobs the dimension of each observation dimstate the dimension of each state dimcov
- Template Parameters
-
float_t (e.g. double, float, etc.) dim_s_state the dimension of the state vector that's sampled dim_ns_state the dimension of the state vector that isn't sampled dimobs the dimension of each observation vector
