auxiliary_pf.h File Reference
A base class for Auxiliary Particle Filtering. Inherit from this if you want to use an APF for your state space model. Filtering only, no smoothing. More...
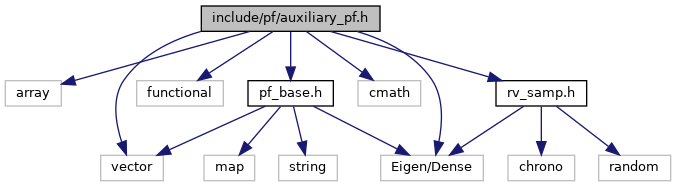
#include <array>#include <vector>#include <functional>#include <Eigen/Dense>#include <cmath>#include "pf_base.h"#include "rv_samp.h"
Include dependency graph for auxiliary_pf.h:
Go to the source code of this file.
Classes | |
| class | pf::filters::APF< nparts, dimx, dimy, resamp_t, float_t, debug > |
| A base-class for Auxiliary Particle Filtering. Filtering only, no smoothing. More... | |
Detailed Description
A base class for Auxiliary Particle Filtering. Inherit from this if you want to use an APF for your state space model. Filtering only, no smoothing.
- Template Parameters
-
nparts the number of particles dimx the dimension of the state dimy the dimension of the observations resamp_t the resampler type
