A base-class for Auxiliary Particle Filtering. Filtering only, no smoothing.
More...
#include <auxiliary_pf.h>
|
| | APF (const unsigned int &rs=1) |
| | The constructor. More...
|
| |
|
virtual | ~APF () |
| | The (virtual) destructor.
|
| |
| float_t | getLogCondLike () const |
| | Get the latest log conditional likelihood. More...
|
| |
| std::vector< Mat > | getExpectations () const |
| | return all stored expectations (taken with respect to $p(x_t|y_{1:t})$ More...
|
| |
| void | filter (const osv &data, const std::vector< std::function< const Mat(const ssv &)> > &fs=std::vector< std::function< const Mat(const ssv &)> >()) |
| | Use a new datapoint to update the filtering distribution (or smoothing if pathLength > 0). More...
|
| |
| virtual float_t | logMuEv (const ssv &x1)=0 |
| | Evaluates the log of mu. More...
|
| |
| virtual ssv | propMu (const ssv &xtm1)=0 |
| | Evaluates the proposal distribution taking a Eigen::Matrix<float_t,dimx,1> from the previous time's state, and returning a state for the current time. More...
|
| |
| virtual ssv | q1Samp (const osv &y1)=0 |
| | Samples from q1. More...
|
| |
| virtual ssv | fSamp (const ssv &xtm1)=0 |
| | Samples from f. More...
|
| |
| virtual float_t | logQ1Ev (const ssv &x1, const osv &y1)=0 |
| | Evaluates the log of q1. More...
|
| |
| virtual float_t | logGEv (const osv &yt, const ssv &xt)=0 |
| | Evaluates the log of g. More...
|
| |
| virtual void | filter (const obs_sized_vec &data, const func_vec &fs=func_vec())=0 |
| | the filtering function that must be defined More...
|
| |
| virtual float_t | getLogCondLike () const=0 |
| | the getter method that must be defined (for conditional log-likelihood) More...
|
| |
|
virtual | ~pf_base () |
| | virtual destructor
|
| |
|
| using | ssv = Eigen::Matrix< float_t, dimx, 1 > |
| |
| using | osv = Eigen::Matrix< float_t, dimy, 1 > |
| |
| using | Mat = Eigen::Matrix< float_t, Eigen::Dynamic, Eigen::Dynamic > |
| |
| using | arrayfloat_t = std::array< float_t, nparts > |
| |
| using | arrayVec = std::array< ssv, nparts > |
| |
| using | arrayUInt = std::array< unsigned int, nparts > |
| |
|
|
using | float_type = float_t |
| |
|
using | obs_sized_vec = Eigen::Matrix< float_t, dimobs, 1 > |
| |
|
using | state_sized_vec = Eigen::Matrix< float_t, dimstate, 1 > |
| |
|
using | dynamic_matrix = Eigen::Matrix< float_t, Eigen::Dynamic, Eigen::Dynamic > |
| |
|
using | func = std::function< const dynamic_matrix(const state_sized_vec &)> |
| |
|
using | func_vec = std::vector< func > |
| |
|
static constexpr unsigned int | dim_obs |
| |
|
static constexpr unsigned int | dim_state |
| |
template<size_t nparts, size_t dimx, size_t dimy, typename resamp_t, typename float_t, bool debug = false>
class pf::filters::APF< nparts, dimx, dimy, resamp_t, float_t, debug >
A base-class for Auxiliary Particle Filtering. Filtering only, no smoothing.
- Author
- taylor
◆ arrayfloat_t
template<size_t nparts, size_t dimx, size_t dimy, typename resamp_t , typename float_t , bool debug = false>
type alias for array of float_ts
◆ arrayUInt
template<size_t nparts, size_t dimx, size_t dimy, typename resamp_t , typename float_t , bool debug = false>
type alias for array of unsigned ints
◆ arrayVec
template<size_t nparts, size_t dimx, size_t dimy, typename resamp_t , typename float_t , bool debug = false>
type alias for array of state vectors
◆ Mat
template<size_t nparts, size_t dimx, size_t dimy, typename resamp_t , typename float_t , bool debug = false>
| using pf::filters::APF< nparts, dimx, dimy, resamp_t, float_t, debug >::Mat = Eigen::Matrix<float_t,Eigen::Dynamic,Eigen::Dynamic> |
|
private |
type alias for linear algebra stuff (dimension of the state ^2)
◆ osv
template<size_t nparts, size_t dimx, size_t dimy, typename resamp_t , typename float_t , bool debug = false>
| using pf::filters::APF< nparts, dimx, dimy, resamp_t, float_t, debug >::osv = Eigen::Matrix<float_t,dimy,1> |
|
private |
"observation size vector" type alias for linear algebra stuff
◆ ssv
template<size_t nparts, size_t dimx, size_t dimy, typename resamp_t , typename float_t , bool debug = false>
| using pf::filters::APF< nparts, dimx, dimy, resamp_t, float_t, debug >::ssv = Eigen::Matrix<float_t,dimx,1> |
|
private |
"state size vector" type alias for linear algebra stuff
◆ APF()
template<size_t nparts, size_t dimx, size_t dimy, typename resamp_t , typename float_t , bool debug>
| pf::filters::APF< nparts, dimx, dimy, resamp_t, float_t, debug >::APF |
( |
const unsigned int & |
rs = 1 | ) |
|
The constructor.
- Parameters
-
| rs | resampling schedule (e.g. resample every rs time points). |
◆ filter()
template<size_t nparts, size_t dimx, size_t dimy, typename resamp_t , typename float_t , bool debug>
| void pf::filters::APF< nparts, dimx, dimy, resamp_t, float_t, debug >::filter |
( |
const osv & |
data, |
|
|
const std::vector< std::function< const Mat(const ssv &)> > & |
fs = std::vector<std::function<const Mat(const ssv&)> >() |
|
) |
| |
Use a new datapoint to update the filtering distribution (or smoothing if pathLength > 0).
- Parameters
-
| data | a Eigen::Matrix<float_t,dimy,1> representing the data |
| fs | a std::vector of callback functions that are used to calculate expectations with respect to the filtering distribution. |
◆ fSamp()
template<size_t nparts, size_t dimx, size_t dimy, typename resamp_t , typename float_t , bool debug = false>
Samples from f.
- Parameters
-
| xtm1 | a Eigen::Matrix<float_t,dimx,1> representing the previous time's state. |
- Returns
- a Eigen::Matrix<float_t,dimx,1> state sample for the current time.
◆ getExpectations()
template<size_t nparts, size_t dimx, size_t dimy, typename resamp_t , typename float_t , bool debug>
| auto pf::filters::APF< nparts, dimx, dimy, resamp_t, float_t, debug >::getExpectations |
return all stored expectations (taken with respect to $p(x_t|y_{1:t})$
- Returns
- return a std::vector<Mat> of expectations. How many depends on how many callbacks you gave to
◆ getLogCondLike()
template<size_t nparts, size_t dimx, size_t dimy, typename resamp_t , typename float_t , bool debug>
| float_t pf::filters::APF< nparts, dimx, dimy, resamp_t, float_t, debug >::getLogCondLike |
Get the latest log conditional likelihood.
- Returns
- a float_t of the most recent conditional likelihood.
◆ logGEv()
template<size_t nparts, size_t dimx, size_t dimy, typename resamp_t , typename float_t , bool debug = false>
| virtual float_t pf::filters::APF< nparts, dimx, dimy, resamp_t, float_t, debug >::logGEv |
( |
const osv & |
yt, |
|
|
const ssv & |
xt |
|
) |
| |
|
pure virtual |
Evaluates the log of g.
- Parameters
-
| yt | a Eigen::Matrix<float_t,dimy,1> representing time t's data observation. |
| xt | a Eigen::Matrix<float_t,dimx,1> representing time t's state. |
- Returns
- a float_t evaluation.
◆ logMuEv()
template<size_t nparts, size_t dimx, size_t dimy, typename resamp_t , typename float_t , bool debug = false>
| virtual float_t pf::filters::APF< nparts, dimx, dimy, resamp_t, float_t, debug >::logMuEv |
( |
const ssv & |
x1 | ) |
|
|
pure virtual |
Evaluates the log of mu.
- Parameters
-
| x1 | a Eigen::Matrix<float_t,dimx,1> representing time 1's state. |
- Returns
- a float_t evaluation.
◆ logQ1Ev()
template<size_t nparts, size_t dimx, size_t dimy, typename resamp_t , typename float_t , bool debug = false>
| virtual float_t pf::filters::APF< nparts, dimx, dimy, resamp_t, float_t, debug >::logQ1Ev |
( |
const ssv & |
x1, |
|
|
const osv & |
y1 |
|
) |
| |
|
pure virtual |
Evaluates the log of q1.
- Parameters
-
| x1 | a Eigen::Matrix<float_t,dimx,1> representing time 1's state. |
| y1 | a Eigen::Matrix<float_t,dimy,1> representing time 1's data observation. |
- Returns
- a float_t evaluation.
◆ propMu()
template<size_t nparts, size_t dimx, size_t dimy, typename resamp_t , typename float_t , bool debug = false>
Evaluates the proposal distribution taking a Eigen::Matrix<float_t,dimx,1> from the previous time's state, and returning a state for the current time.
- Parameters
-
| xtm1 | a Eigen::Matrix<float_t,dimx,1> representing the previous time's state. |
- Returns
- a Eigen::Matrix<float_t,dimx,1> representing a likely current time state, to be used by the observation density.
◆ q1Samp()
template<size_t nparts, size_t dimx, size_t dimy, typename resamp_t , typename float_t , bool debug = false>
Samples from q1.
- Parameters
-
| y1 | a Eigen::Matrix<float_t,dimy,1> representing time 1's data point. |
- Returns
- a Eigen::Matrix<float_t,dimx,1> sample for time 1's state.
The documentation for this class was generated from the following file:
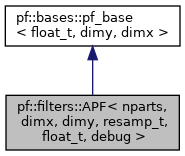
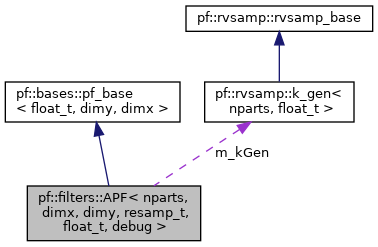
 Public Member Functions inherited from pf::bases::pf_base< float_t, dimy, dimx >
Public Member Functions inherited from pf::bases::pf_base< float_t, dimy, dimx >